A busca por inovações tem sido crescente nos novos projetos de engenharia e uma das fontes de inspiração recorrente é a natureza. A bioinspiração pode ser entendida como um paradigma no qual se busca imitar os fenômenos da natureza para guiar projetos de engenharia. Isso tem motivado a criação de novos materiais, sistemas multidisciplinares e outras tantas soluções.
Dentre os diversos exemplos disponíveis, o mais emblemático é provavelmente um avião que imita o voo de um pássaro, morfando a estrutura para otimizar as condições de voo. A ideia da morfagem pode ser utilizada em outras inúmeras situações como as pás de turbinas eólicas e robôs. A trem bala do Japão também usou os pássaros para motivar a solução para o ruído excessivo. Outros exemplos incluem o traje de natação inspirado nas escamas de tubarões (utilizado nas olimpíadas de 1992).
As próteses também podem ser melhoradas com a imitação das partes que se destinam substituir. Nesse contexto, este artigo apresenta uma prótese inteligente para um pé humano, uma solução que melhor representa o pé real. A ideia é combinar uma estrutura de tensegridade com materiais inteligentes que possuem um acoplamento multifísico.
Tensegridade
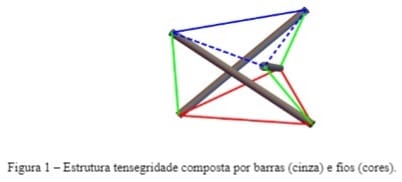
As estruturas de tensegridade são compostas por barras e fios, combinando tração e compressão dos elementos. As barras têm função de elementos compressivos, enquanto os fios têm função de elementos trativos. Esse arranjo torna a estrutura leve e auto equilibrada, com alta capacidade de carga e resistência similar às estruturas convencionais. Tais estruturas têm se tornado cada vez mais utilizadas no âmbio da biomímica por conseguirem representar o comportamento de sistemas biológicos, indo desde ao comportamento de células, estrutura molecular de uma teia de aranha, à partes do corpo de animais e seres humanos. O conceito de tensegridade em conjunto com a bioinspiração recebe o nome de biotensegridade. A Figura 1 mostra uma estrutura tensegridade típica mostrando as barras em cinza e os fios em outras cores.
A prótese para o pé humano considera uma estrutura composta por barras, que representam os ossos; e fios, que representam tendões e ligamentos. A forma geral da estrutura é feita para imitar a geometria do pé humano, formando uma biotensegridade.
O pé humano
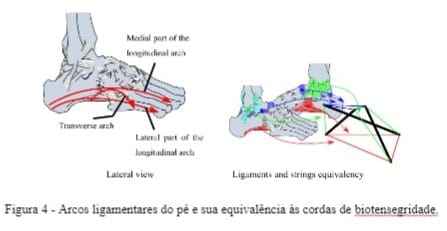
Três aspectos estruturais são de interesse para estabelecer uma analogia entre o pé humano e a estrutura de biotensegridade: a distribuição de peso realizada pelos ossos e suas relações com os elementos rígidos da tensegridade; os ligamentos do pé e sua relação com os fios; e a fisiologia do pé e sua relação com a capacidade de imitar os movimentos do pé.
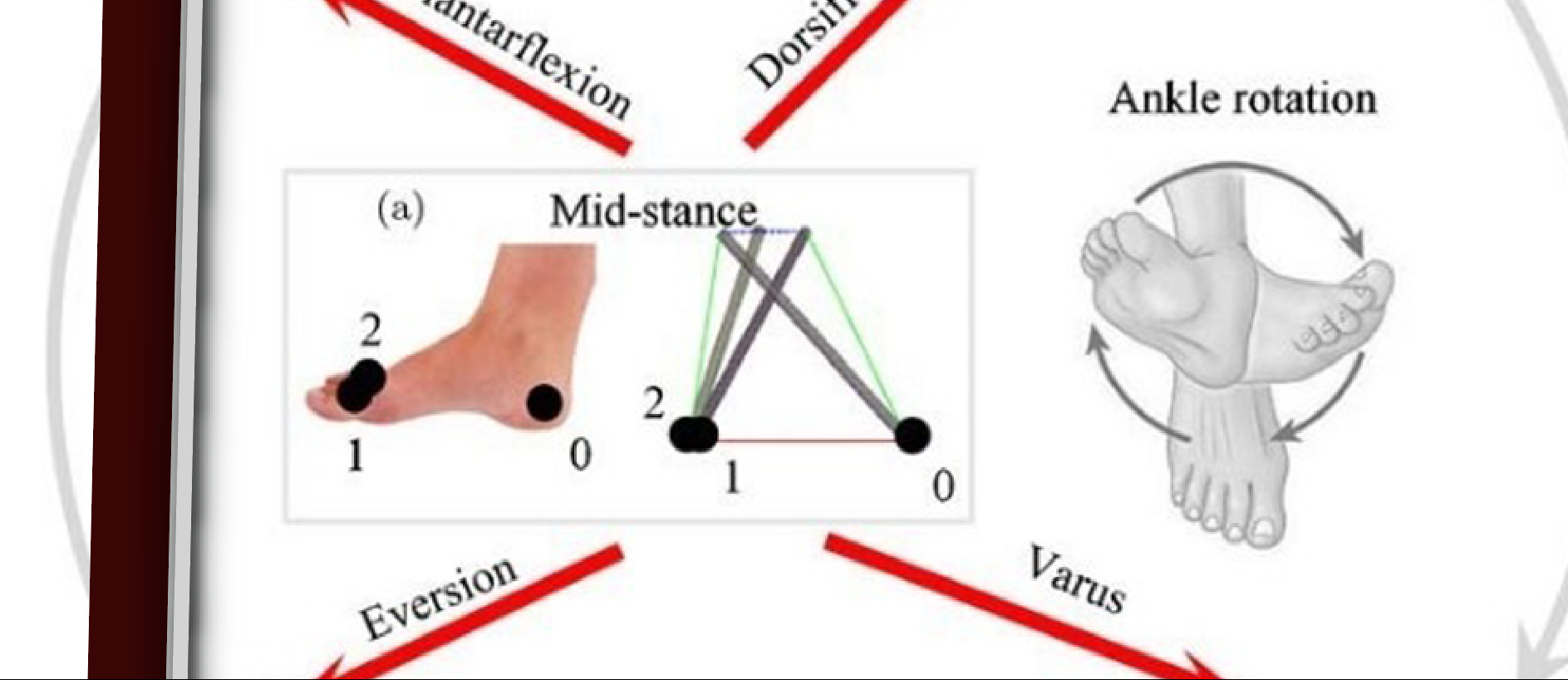
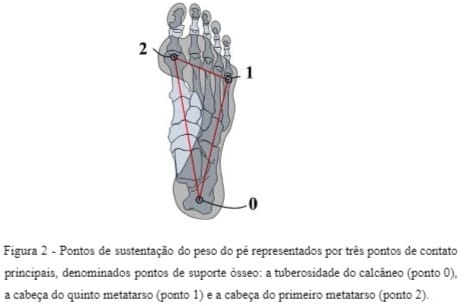
O pé humano possui três pontos de contato, chamados de pontos de apoio ósseo, representados pela tuberosidade calcânea (ponto 0), a cabeça do quinto metatarso (ponto 1) e a cabeça do primeiro metatarso (ponto 2), formando um triângulo chamado de arco plantar (triângulo vermelho), Figura 2.
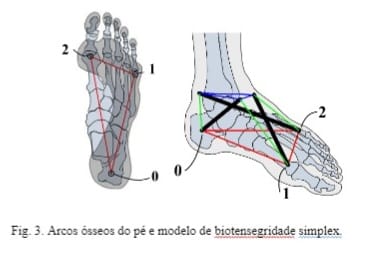
Músculos, ligamentos e tendões têm uma função essencial na fisiologia do pé. Na estrutura de tensegridade eles são representados pelos fios, tendo em vista sua similaridade funcional. A tensegridade é acomodada sobre o arco plantar, cujas barras coincidem com os pontos de apoio ósseo que suportam a carga. Os arcos de ligamento de interesse levam à acomodação dos fios da estrutura de tensegridade para representar os ligamentos do pé. Finalmente, isso leva à construção da estrutura de biotensegridade com base triangular (Figura 4).
A funcionalidade da prótese para imitar o pé humano é conferida através de materiais inteligentes, notadamente as ligas com memória de forma. Os materiais inteligentes possuem um acoplamento multifísico o que significa que existe acoplamento entre diferentes campos físicos como mecânico, térmico, elétrico e magnético. As ligas com memória de forma (SMAs – do inglês, shape memory alloys) possuem um acoplamento termomecânico. As transformações de fase sólidas são responsáveis pelas propriedades singulares dessas ligas em que o principal fenômeno é a recuperação de uma forma pré estabelecida a partir de um carregamento termomecânico apropriado.
Desta forma, a prótese biotensegridade possui barras e fios de SMA que proporcionam uma mudança de forma a partir da mudança de temperatura. Operacionalmente, a mudança de temperatura é proporcionada por corrente elétrica, através do efeito Joule. Um modelo matemático é elaborado para emular o comportamento termomecânico da prótese e, para detalhes, ver a referência Brandão & Savi (2022).
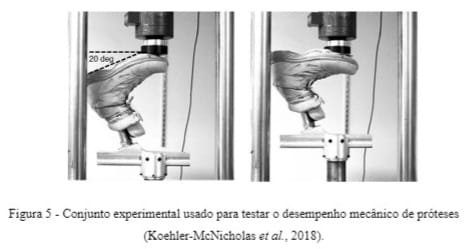
Dois pontos são essenciais para testar a capacidade da prótese: a resistência mecânica; e a funcionalidade representada pelos movimentos. O desempenho mecânico é avaliado estabelecendo uma comparação com próteses comerciais disponíveis, observando força e rigidez. Uma comparação utilizando como base experimentos de Koehler-McNicholas et al. (2018) considerando próteses em estado usado. A ideia é testar as próteses comerciais com um ângulo de 20◦ de acordo com a ISO 10328. O teste carrega a prótese de pé até uma carga de peso corpóreo de três indivíduos mais 22kg de um suposto peso carregado. Esse peso extra simula uma carga sendo carregada pelos usuários enquanto em uso. A Figura 5 mostra o teste em uma prótese.
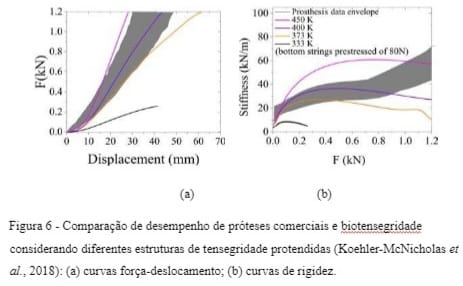
Uma comparação entre as próteses comerciais e a biotensegridade é realizada considerando a Figura 6 que mostra um envelope contendo todos os resultados experimentais de Koehler-McNicholas et al. (2018) e a prótese de biotensegridade para diferentes temperaturas nos fios de SMA do topo e da base, enquanto os fios verticais são mantidos a uma temperatura constante. Nota-se que a estrutura de biotensegridade apresenta um desempenho similar às próteses comerciais considerando tanto força quanto rigidez.
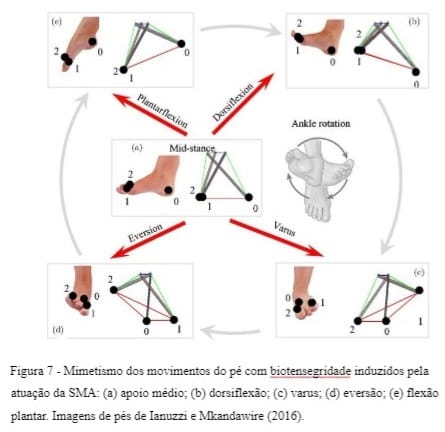
A fisiologia da prótese é realizada considerando atuação através de diferentes temperaturas impostas às SMAs, representando a ação de músculos, ligamentos e tendões. Movimentos típicos do pé são representados: flexão plantar, dorso flexão, eversão e varus. A Figura 7 resume a fisiologia do pé atuada por fios de SMA partindo do repouso e mostrando as posições de flexão plantar, flexão dorsal, eversão e varus. Desta forma, observa-se que a prótese possui capacidade de imitar os movimentos essenciais do pé. Isso associado ao desempenho mecânico é uma prova de conceito do uso da biotensegridade para a próteses de pé humano, que possuem um potencial para desempenho superior às próteses comerciais disponíveis atualmente.
Referências:
1. Brandão, A., Savi, M.A. (2022), “Nonlinear Mechanics of a Smart Biotensegrity Human Foot Prosthesis”, International Journal of Applied Mechanics, v.14, n.1, Article 2150124, 2022.
2. Ianuzzi, A., Mkandawire, C. (2016), “Applications of UHMWPE in Total Ankle Replacements” in UHMWPE Biomaterials Handbook: Ultra High Molecular Weight Polyethylene in Total Joint Replacement and Medical Devices: Third Edition, (Elsevier Inc.).
3. Koehler-McNicholas, S.R., Nickel, E.A., Barrons, K., Blaharski, K.E., Dellamano, C.A., Ray, S.F., Schnall, B.L., Hendershot, B.D., Hansen, A.H. (2018), “Mechanical and dynamic characterization of prosthetic feet for high activity users during weighted and unweighted walking”, PLoS One, 13, 1–16.
Este conteúdo foi útil para você?

")

